![]()
一步最优预测估值
![]()
![]()
+1|
![]()
需要经观测值
![]()
![]()
+1的修正后才能得到
![]()
![]()
+1的最优估值
![]()
![]()
+1,即
[249-04]
![]()
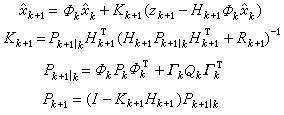
这个方程右端的第二项表示校正项,其中括号内的项称为新息。K
![]()
+1 称为增益阵。因此卡尔曼滤波方法可直观表述为在一步最优预测估值的基础上增加新息校正。新息是由第k+1步观测决定的,其中包含由噪声引起的观测误差。增益矩阵 K
![]()
+1对它有调节作用,当噪声很大时K
![]()
+1的元会自动地取较小的值,反之则取较大的值。卡尔曼滤波的四个递推方程是:
[249-05]
式中R
![]()
=E
![]()
![]()
![]()
![]()
Tag:数学知识,数学知识大全,初中学习网 - 数理化百科 - 数学知识
- 经典数学:卡尔曼-布什滤波
- › 2016经典数学文化之祝福短信里的数学
- › 小学经典数学文化:大数记法
- › 经典数学文化之测望术和重差理论
- › 小学经典数学文化之数的世界
- › 经典数学文化之最大树龄法
- › 小学经典数学游戏:巧得入场卷
- › 小学经典数学游戏之数字和字母正方形的规律
- › 一年级小学经典数学游戏大全
- › 小学经典数学游戏大全
- › 最新经典数学游戏之旅行者和狗
- › 经典数学游戏:缺失的数字
- › 小学经典数学游戏:三个A
- 在百度中搜索相关文章:经典数学:卡尔曼-布什滤波
- 在谷歌中搜索相关文章:经典数学:卡尔曼-布什滤波
- 在soso中搜索相关文章:经典数学:卡尔曼-布什滤波
- 在搜狗中搜索相关文章:经典数学:卡尔曼-布什滤波